È online l'ottavo contributo di quest'anno dedicato alla promozione dei risultati della ricerca dei nostri dottorandi.
Matteo Caruso - Corso di Dottorato in Ingegneria Industriale e dell'Informazione
Dynamic Modeling and Simulation of a Robotic Lander Based on Variable Radius Drums
Nell’esplorazione spaziale, l’atterraggio morbido su corpi celesti, per un lander, rappresenta il compito più importante e critico dell’intera missione spaziale. Da esso ne dipende il successo o il fallimento, che nel caso peggiore risulta nella perdita di tempo, materiali e investimenti. Quando bisogna studiare l’atterraggio morbido, sorgono due problematiche: la prima riguardante la corretta progettazione e lo sviluppo di un modello dinamico rappresentativo del sistema che dovrà essere impiegato, che deve avere capacità di mitigazione dell’impatto e al contempo elevata stabilità; il secondo invece riguarda la determinazione delle caratteristiche, possibilmente in anticipo, del terreno che ha una grande influenza durante l’impatto.
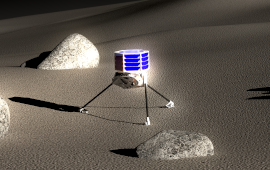
Il lander proposto è caratterizzato dall’essere modulare, riutilizzabile e dall’avere un elevato rapporto di massa payload/lander. Date le condizioni operative, viene prima sintetizzato il profilo delle VRD, dunque sviluppato un modello dinamico bidimensionale semplificato del lander, viene altresì costruito e simulato un modello completo in ADAMS, un simulatore dinamico commerciale di sistemi multi-body. Le simulazioni eseguite sono basate sulla determinazione sperimentale delle caratteristiche di un campione di terreno, formato da sabbia basaltica di origine vulcanica con granulometria media da 3 a 5 mm, che ricade nelle sabbie grossolane. Infine, il lander proposto ed il suo modello dinamico vengono validati numericamente con un confronto con le simulazioni in ADAMS. Si considerano due casi: il primo è l’impatto su una superfice orizzontale (vedi Figura 1 a sinistra), in cui si studia il comportamento del sistema insieme all’analisi delle distribuzioni di forza di contatto, accelerazione e apertura angolare delle zampe del lander; il secondo invece è una simulazione di ribaltamento (vedi Figura 1 a destra) il cui scopo è trovare l’angolo critico del sito di atterraggio al quale il lander si ribalta, che è stato trovato essere 51.6°.
Un nuovo lander a tre zampe viene progettato e presentato. Il lander utilizza un meccanismo che impiega Variable Radius Drums (VRDs), dispositivi caratterizzati dalla variazione del raggio della bobina lungo il loro profilo; cavi e molle lineari per il trasferimento e l’immagazzinamento dell’energia d’impatto. Viene introdotto inoltre, un dente di arresto allo scopo di prevenire lo scaricamento delle molle, quindi impedendo al lander di rimbalzare e mentendone il corpo vicino al suolo e aumentandone la stabilità. Il meccanismo principale funge da dispositivo ammortizzante completamente passivo che ha la capacità di modellare la risposta elastica di una molla precaricata. In questo contesto viene usato per assicurare una forza costante tra il pad del lander ed il suolo, quindi esercitando una decelerazione controllata della strumentazione di bordo e del payload durante l’impatto, impedendo il danneggiamento causato da forti accelerazioni.